More BSDCan Videos
The final set of videos from BSDCan 2015 have been released.
The final set of videos from BSDCan 2015 have been released.
Planning a radio field day was all it took to ruin a week of perfect weather. Instead of the glorious sunshine and high temperatures of the previous days the North Sea took revenge and summoned an mighty Haar to punish us for our hubris.

We hit the beach with a bbq, food and a couple of radios. Hibby had his new toy, a clansman set including a 5m mast. The mast was light to carry, easy to slot together actually really easy to put up. I think with some practice it could be erected by one person by pegging in the guy lines first.

The bands were relatively quiet considering it was a Friday afternoon, but Hibby and Derecho had a couple of good contacts from across Europe. This radio nonsense was what interested me though, I was more interested in the playing in the dune system.

Paris loves the theatre, they have world renowned plays enjoyed by douchy teenage girls the world around. They love no theatre more than Security Theatre. To transit through Paris CDG and make it to the departure lounge you need to show your passport twice and your boarding pass at least six times.
In fact one agent of the airport was enjoying her role more than anyone I have seen at work. She scanned my boarding pass and scrutinized my passport before sending me through the metal discoverer.
At the other side I waited and waited expecting my bag. Instead I hear a shriek! 'You did not show me your pass'. I am dragged back through the magnetic arch to show my passport once again. This this with the agent shouting as if I had stripped half naked.
Oh fun.
BHX is a strange airport, security are trying to stay in business and keep manning up. They manage this by directing transfer passengers back through security to redo the dance, I did get set on the priority track though.
Of course, with a flights worth of passengers transferring this wasn't quick.
Past security and a worm whole takes you to a mall in the center of the city. A shopping horror exists until you overcome the forces of capitalism and resign your self to sit in the uncomfortable long.
The Mega Charity Mozilla keeps offices for their staff in many major cities. I think most of their staff work from home, but some must visit offices and the require space to hold meetings. Hopefully Mozilla Space Paris is the most decant of them all.

The space has all the trappings you would expect from a hip and trendy startup, mozilla sort of is. They have a big airy space, a fancy cateries kitchen and the most insane meeting room I have ever seen. You can see from the pictures why the French Revolution started.

I should probably apoligize to anyone that has donated to mozilla in the past. I took full use of their stocked kitchen and to avoid the ridiculous parisian beer prices drank more than my share of mozilla beer. Yum yum.
The best way to get around Paris is to use the metro, if you are coming into CGD you can take the train to Gard du Nord then hop onto the metro from there. Metro stations seem to be dense enough that there will be one near to your destination, I didn't see more than a 10 minute walk.
Using the metro fulfilled every Parisian stereotype I had, lovers kissing, gypsies begging, men busking with accordions. The metro was a brilliant way to get around very entertaining.
Just as entertaining for me(though some might not enjoy it) was my pre metro knowledge walk across Paris to reach my hotel. On the map before traveling the walk didn't look every long. I didn't have any frame of reference for Paris, but a similar distance around the Thames in London would be a reasonable walk. Well reasonable to people that like to walk through cities.
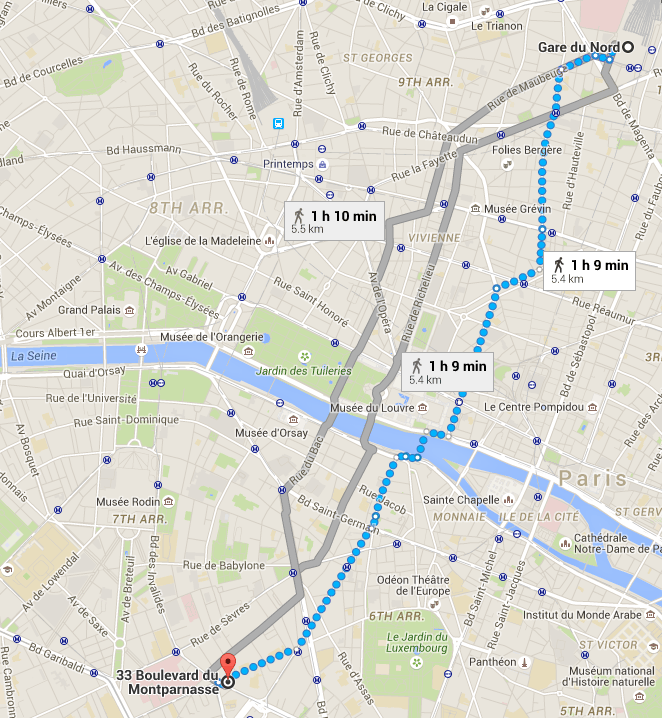
With the 30°C heat at 1800 it was probably a little long for a 6Km walk through the city. But the walk was very fortuitous if I had been down in the metro I wouldn't have seen the stunning sights of Paris, large buildings, street gangs, passed out tramps that have pissed them selves and the myriad of cheap suit shops. Shiny silver suits are a steal at 50€.
After a couple of bouts of despair I reached my hotel in once piece, only loosing about 5 kilos in water.